Research
The following are research projects I have been a part of.
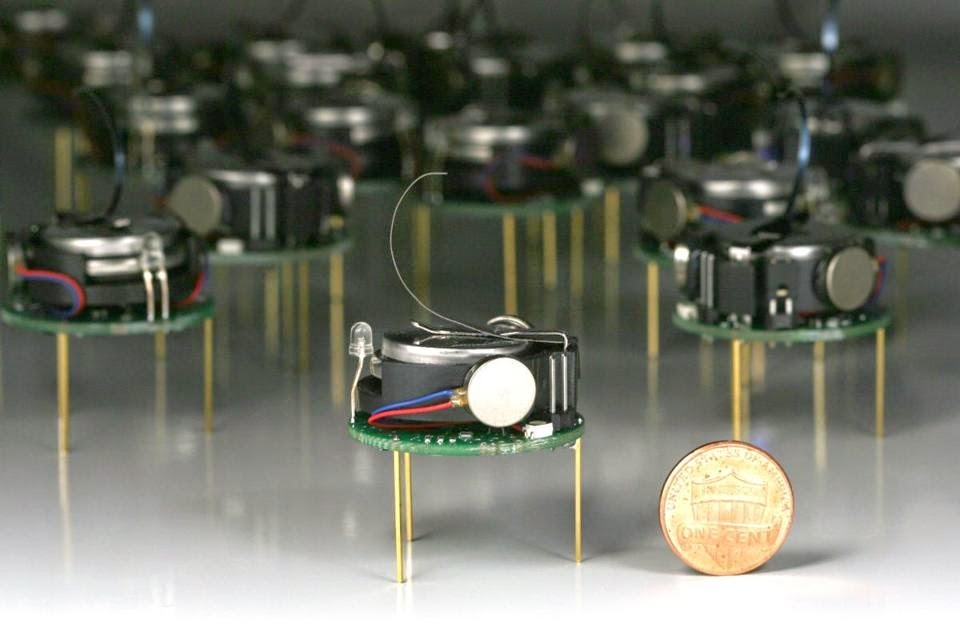
Collective Perception with a Heterogeneous Swarm
Harvard Self-organizing Systems Research Group
Advisor: Professor Radhika Nagpal
This research aims to improve the ability of a large group of robots to perceive and understand their environment by employing agents with different perceptual skills.
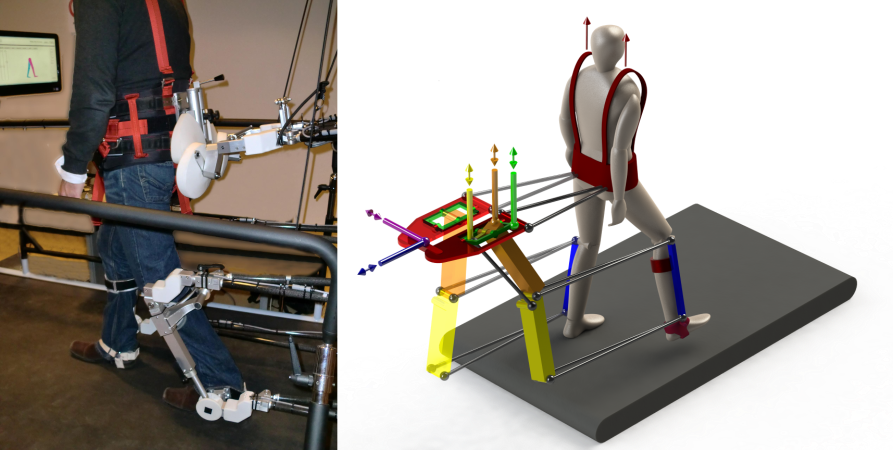
Cooperative Exoskeleton Control for Human Balance Recovery
Imperial College London, Human Robotics Group
Advisors: Professor Etienne Burdet, Dr. Ildar Farkhatdinov
Maintaining balance in the face of perturbations is essential to walking and standing. For my masters thesis, I am developing controls for the LOPES exoskeleton (LOwer-extremity Powered ExoSkeleton, University of Twente) to assist humans with balance recovery after perturbations, using a combination of feed-forward and feedback control (such as hip torques and a PD controller). I am also developing a model of the coupled human-robot system in Simulink to develop and test controls before implementation on LOPES.
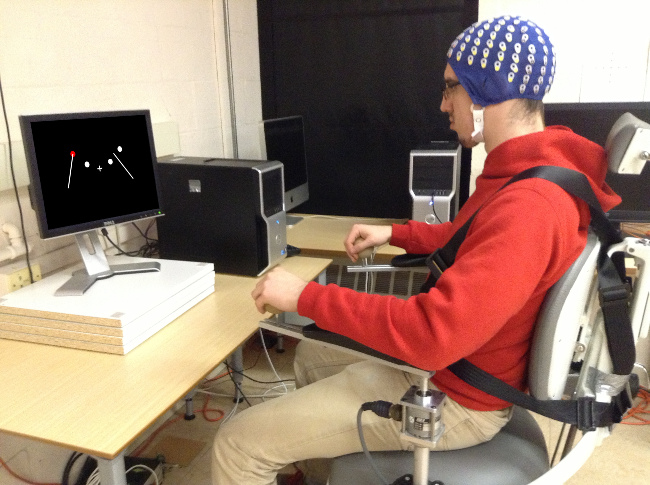
Bimanual Learning and Retention
Northeastern University Action Lab
Advisor: Professor Dagmar Sternad
Asymmetric bimanual tasks, such as eating with a knife and fork, are common in everyday life, but they have received significantly less attention than unimanual or symmetric bimanual tasks in motor neuroscience.
In the current study, subjects learn a bimanual task over 20 days and retun after 3 months to test retention. Participants perform a task in which they move their right arm sinusoidally to a metronome beat while making rapid discrete point-to-point reaching movements with the left arm on a randomly timed cue. Preliminary results suggest an asymmetry in the learning; in bimanual conditions, subjects demonstrated increased speed with the left arm, but were unable to attenuate the perturbation this caused in the right arm, an effect that persists after the break interval.
Plans for future research include investigating neural correlates of the observed asymmetry, possibly with electroencephalography (EEG) or transcranial magnetic stimulation (TMS).

Dimensionality Reduction in Motor Learning
Max Planck Institute for Intelligent Systems, Autonomous Motion Department
Advisor: Professor Stefan Schaal
While many studies have investigated learning to control the redundant high dimensionality of the joint space of the human body, years of experience make such tasks only adaptations of a highly trained system.
The CyberGlove measures 19 joint angles in the hand and provides a novel environment for learning to control high dimensionality. Subjects learn to control a cursor in 2 dimensions through a mapping from the 19 dimensions of the hand. We plan to model this learning to investigate the learning process and understand the structure of exploration in motor learning.